Insider Brief
- Researchers from the Istituto Italiano di Tecnologia and partners have demonstrated a jet-powered humanoid robot, iRonCub-Mk1, capable of flying and balancing in windy conditions, according to a new study published in Nature Communications Engineering.
- The robot uses four jet engines and advanced aerodynamic modeling to manage flight and manipulate its limbs mid-air, offering potential applications in search and rescue, logistics, and multi-modal mobility systems.
- Wind tunnel tests and AI-powered simulations informed a controller that allows the robot to remain stable in flight, marking a key step toward aerial humanoid robots with real-world utility.
If the idea of flying robots seems like something straight out of sci-fi, researchers in a recent study set out to show their science isn’t fiction.
A jet-powered humanoid robot, equipped with advanced aerodynamic modeling, can now fly and balance in windy conditions, potentially transforming tasks like search and rescue, according to a study published in Nature.
The research, conducted by scientists from the Istituto Italiano di Tecnologia and other institutions in Europe and the U.S., introduces a robot called iRonCub-Mk1, which uses jet engines to achieve flight and sophisticated computer models to manage the complex forces of air resistance. This breakthrough could pave the way for robots that combine human-like dexterity with aerial mobility, offering new possibilities for industries ranging from disaster response to logistics.
What Are The Key Findings?
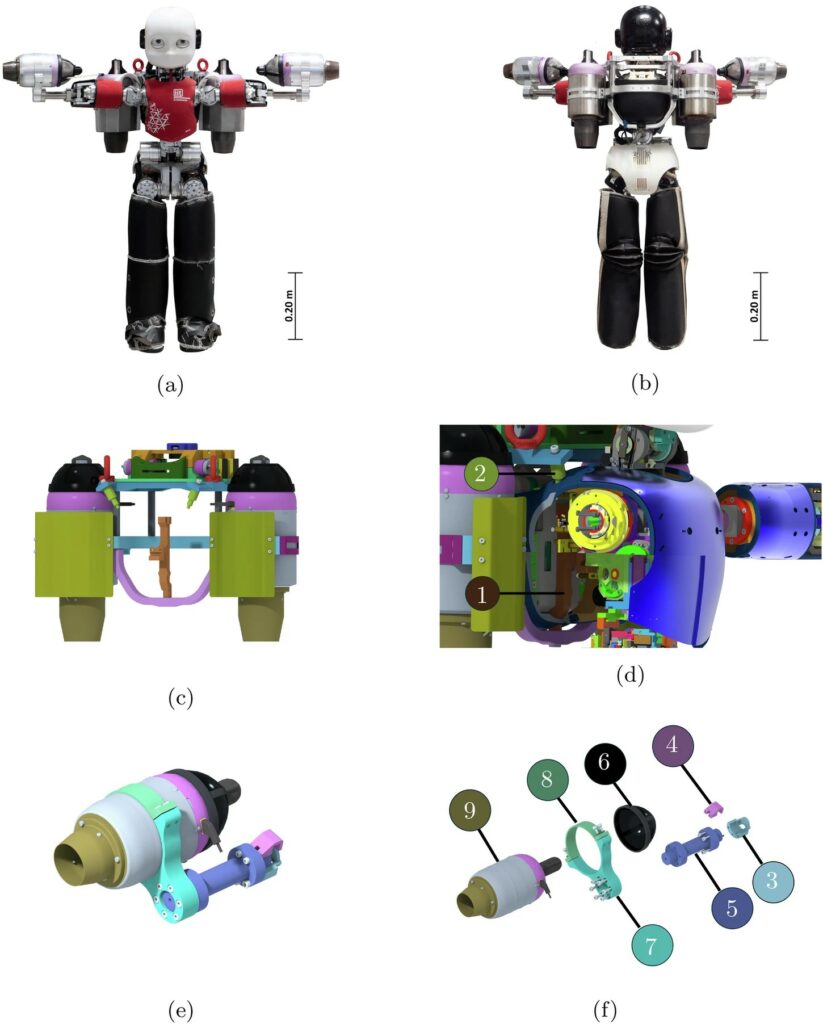
The study, led by researchers including Donato Grassi and Daniele Pucci, focuses on iRonCub-Mk1, a 43.3-kilogram humanoid robot based on the iCub v2.7 platform. Unlike traditional drones or wheeled robots, iRonCub-Mk1 is designed to walk, manipulate objects, and fly. It achieves this through four jet engines—two on its back for lift and two on its forearms for steering. The researchers equipped the robot with a custom jetpack and reinforced forearms to handle the engines’ thrust, ensuring the robot could support its weight and carry payloads during flight.
To control the robot in the air, the scientists developed a method to model and counteract aerodynamic forces, which are the pressures and resistances caused by air moving around the robot’s complex, human-like shape. They used computer simulations and wind tunnel tests to measure how air interacts with the robot’s body at different angles and speeds. These tests, conducted at the Politecnico di Milano’s wind tunnel, involved 400 measurements across 54 configurations, revealing how joint movements affect air resistance. The data showed that joint positions could change aerodynamic forces by up to 20%, a critical insight for maintaining stability.
The researchers then created two models to predict these forces: a deep neural network, which uses artificial intelligence to make precise predictions, and a simpler linear regression model, which offers a less accurate but physically consistent approximation. These models were integrated into a simulator, allowing the team to design a controller that adjusts the robot’s joints and jet thrust to maintain balance in windy conditions.
Flight simulations demonstrated that this “aerodynamic-aware” controller kept the robot stable, while a basic controller, ignoring air resistance, caused the robot to fall. Balancing experiments on the physical iRonCub-Mk1 prototype confirmed the controller’s effectiveness, with the robot maintaining stability despite simulated wind.
What Are The Implications?
The study’s findings, detailed in the Nature Communications Engineering article, suggest that flying humanoid robots could revolutionize tasks requiring both mobility and manipulation. In search and rescue, such robots could navigate disaster zones, flying over rubble to deliver supplies or assist survivors, then using their arms to clear debris. In logistics, they could streamline warehouse operations by flying to high shelves and handling packages. The ability to operate in windy conditions makes them viable for outdoor tasks, unlike many lightweight drones that struggle in gusty environments.
The research also highlights the potential for multi-modal robots—machines that can walk, fly, or roll—to outperform single-mode systems. By combining human-like versatility with aerial capabilities, iRonCub-Mk1 could reduce the need for specialized equipment, lowering costs for industries. The study’s authors emphasize that the aerodynamic modeling approach could apply to other shape-shifting robots, such as morphing drones, broadening its impact.
How Did The Researchers Accomplish This?
To achieve these results, the researchers employed a multi-step process, as outlined in the study. They began with the mechanical design of iRonCub-Mk1, modifying the iCub v2.7 robot to integrate jet engines. A stainless steel “spine” connected the back jetpack, while titanium forearms supported the arm engines, ensuring durability under high thrust. The jetpack and forearms were designed to be easily attached, preserving the robot’s original functionality.
Next, the team conducted wind tunnel experiments to measure aerodynamic forces. They tested the robot in various poses, adjusting joint angles and airspeeds to simulate real-world conditions. These experiments provided data on drag (resistance to forward motion) and lift, which were used to validate computer simulations. The simulations, based on the Reynolds-Averaged Navier-Stokes equations, modeled turbulent airflow around the robot’s body. The researchers ran approximately 8,500 simulations to create a comprehensive dataset, which they used to train the neural network and regression models.
The final step involved integrating these models into a flight simulator. The simulator allowed the team to test different controllers, comparing the aerodynamic-aware controller with a baseline version. The controller adjusted the robot’s joint positions and jet thrust in real time, using a quadratic programming algorithm to optimize stability. Balancing experiments on the physical robot validated the simulator’s predictions, confirming the models’ accuracy.
What Are The Limitations Of the Study?
The study acknowledges several limitations. The robot’s current design is not optimized for aerodynamic efficiency, resulting in low lift compared to drag, which reduces flight endurance. The researchers note that future designs could streamline the robot’s shape to improve performance. Additionally, the aerodynamic models assume that wind speed has a minimal impact on forces within the tested range, an assumption that may not hold at higher speeds. The study’s simulations also simplified the robot’s geometry, potentially overlooking subtle airflow interactions between its limbs.
Another limitation is the computational cost of the neural network model, which requires significant processing power for real-time control. The simpler regression model, while less demanding, sacrifices accuracy, which could affect performance in complex scenarios. The researchers also highlight that the controller was tested in controlled settings, and real-world conditions, such as unpredictable gusts, could pose challenges.
What Are The Future Directions?
The study’s authors propose several avenues for future research, as outlined in the Nature Communications Engineering paper. They plan to refine iRonCub-Mk1’s design to enhance aerodynamic efficiency, potentially by reshaping its body or adding adaptive surfaces, like morphing covers, to reduce drag. They also aim to expand the aerodynamic dataset by including a wider range of wind speeds and environmental conditions, improving the models’ robustness.
The researchers intend to develop more advanced controllers that can handle aggressive maneuvers, such as rapid turns or dives, which are critical for tasks like emergency response. They also plan to explore energy-efficient propulsion systems, as jet engines consume significant fuel, limiting flight time. Alternative power sources, such as advanced batteries or hybrid systems, could extend operational range.
Beyond iRonCub-Mk1, the study’s methodology could inform the development of other multi-modal robots. The researchers suggest applying their aerodynamic modeling approach to drones with variable shapes or robots with flexible limbs, enabling precise control in diverse environments. They also envision integrating sensory feedback, such as real-time wind measurements, to enhance the robot’s adaptability.
Conclusion
The development of iRonCub-Mk1, as detailed in the study, marks a significant step toward practical flying humanoid robots. By combining jet propulsion with advanced aerodynamic control, the researchers have created a robot capable of stable flight and manipulation in challenging conditions. While limitations remain, the study’s findings offer a roadmap for future innovations, with potential applications in disaster response, logistics, and beyond. As the technology evolves, flying humanoids could become a common sight, blending the best of human and aerial capabilities to tackle complex tasks.