Insider Brief
- MIT and Stanford engineers developed a vine-inspired robotic gripper that uses soft, inflatable tendrils to wrap around and lift heavy or fragile objects, including a human body.
- The system converts earlier “growing” pneumatic robots into closed-loop mechanisms that can thread under or around targets and retract to lift them, with demonstrations spanning eldercare transfers and robotic-arm grasping.
- Tests showed the gripper could handle items from watermelons to glass vases and navigate cluttered environments, suggesting applications in patient care, logistics, and industrial load handling.
MIT and Stanford University engineers, supported by the National Science Foundation and the Ford Foundation, developed a vine-inspired robotic gripper that twists around objects and lifts them using soft, inflatable tendrils — a design intended to handle heavy or fragile loads more safely than conventional robotic hands. The system adapts biologically inspired “growing” robots into a closed-loop mechanism capable of wrapping around targets and retracting to raise them, including large items and, in testing, a full human body, according to MIT.
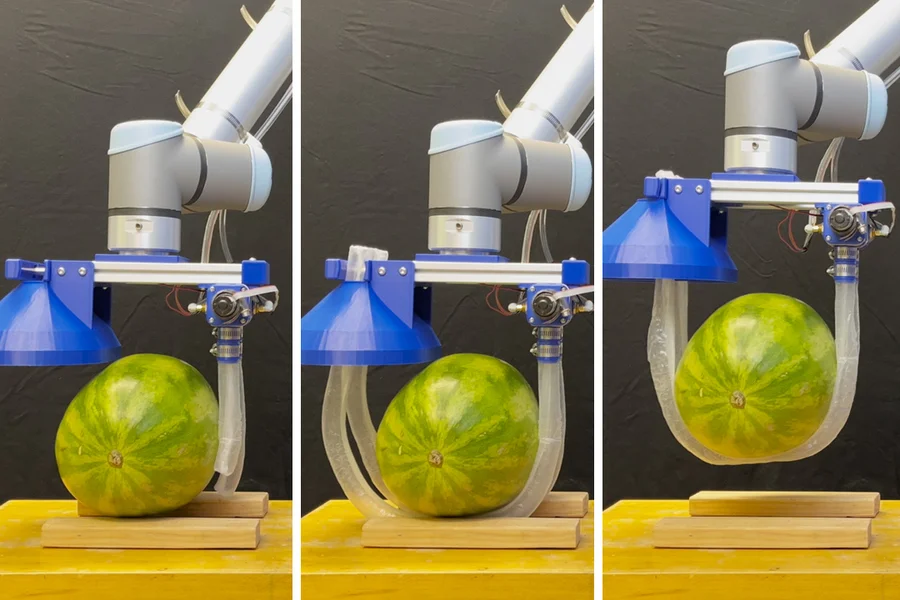
The work, presented in Science Advances, builds on earlier soft robotics research from Stanford University that used pneumatic tubes to extend, steer, and navigate confined spaces. MIT’s contribution centers on converting these open-ended structures into loops that can fasten back to a base unit, enabling the tendrils to form a sling around an object and support its weight during lifting. Researchers said they demonstrated the approach in two formats: a full-scale system capable of sliding under a person in bed and a smaller version attached to a commercial robotic arm.
MIT said tests showed that the gripper could lift items ranging from a watermelon to a glass vase while also reaching through cluttered environments to retrieve objects. The team positions the technology as a potential alternative to current patient-handling equipment in eldercare, which often requires physically repositioning individuals before hoisting them into slings. The soft vines can instead thread themselves beneath a person before closing the loop for lifting.
“Transferring a person out of bed is one of the most physically strenuous tasks that a caregiver carries out,” said Kentaro Barhydt, a PhD candidate in MIT’s Department of Mechanical Engineering. “This kind of robot can help relieve the caretaker, and can be gentler and more comfortable for the patient.”
MIT noted that the design may extend to industrial settings such as logistics and construction, where cranes or robotic arms must handle bulky items with minimal risk of damage. The researchers say the system illustrates a broader design space for soft, inflatable robotics that leverage both open- and closed-loop behaviors to manage delicate positioning and stable load transfer.
Image credit: MIT