
Insider Brief
- Toshiba and MIRISE integrated a quantum-inspired optimization system directly into an autonomous mobile robot, enabling real-time onboard decision-making and navigation.
- The robot uses a new multi-object tracking algorithm to continuously detect, identify and predict the movement of multiple dynamic obstacles, including objects that temporarily overlap or become obscured.
- In real-world tests, the system processed tracking data at 23 frames per second and enabled efficient path planning in crowded environments without relying on external servers.
Autonomous robots may soon carry a new kind of brain on board — one inspired by quantum computing but built from conventional chips.
Toshiba Corporation and MIRISE Technologies Corporation said in a web post that they have achieved what they describe as the world’s first deployment of a quantum-inspired optimization computer embedded directly inside an autonomous mobile robot. The companies reported that the system enabled the robot to track multiple moving objects and navigate in real time, even in crowded environments where people and vehicles frequently cross paths.
The work, published in Nature Communications and two other academic journals — here and here, centers on Toshiba’s Simulated Bifurcation Machine, or SBM, a proprietary system designed to solve complex optimization problems quickly using algorithms derived from quantum computing theory. Unlike a true quantum computer, the SBM runs on standard semiconductor hardware.
According to the researchers, autonomous machines — from warehouse robots to self-driving vehicles — must process large volumes of sensor data under tight constraints. They rely on cameras and laser sensors to detect obstacles and map their surroundings. They must then decide, within fractions of a second, how to move safely and efficiently. At the same time, engineers must limit the size, power use and cost of the onboard computing hardware.
Balancing those competing demands has become increasingly difficult as the environments in which robots operate grow more complex, according to the companies.
Quantum-inspired systems such as SBM are designed to tackle a class of problems known as combinatorial optimization. These are tasks in which a system must evaluate many possible combinations — such as matching detected objects in camera frames to previously tracked objects — and choose the best arrangement under given constraints. Classical computers can solve such problems, but the computational load can rise sharply as the number of variables increases.
Quantum-inspired approaches aim to speed up this search process by using algorithms modeled on physical processes described in quantum mechanics. Unlike quantum computers, however, they do not require cryogenic temperatures or exotic materials. They can run on familiar chips such as field-programmable gate arrays, or FPGAs, graphics processing units and application-specific integrated circuits.
Embedding Optimization at the Edge
Previous implementations of quantum-inspired optimization systems have typically been centralized, running on servers that control fleets of robots or vehicles remotely. Toshiba and MIRISE said their achievement marks the first time such a system has been embedded directly into a mobile platform and used for autonomous control.
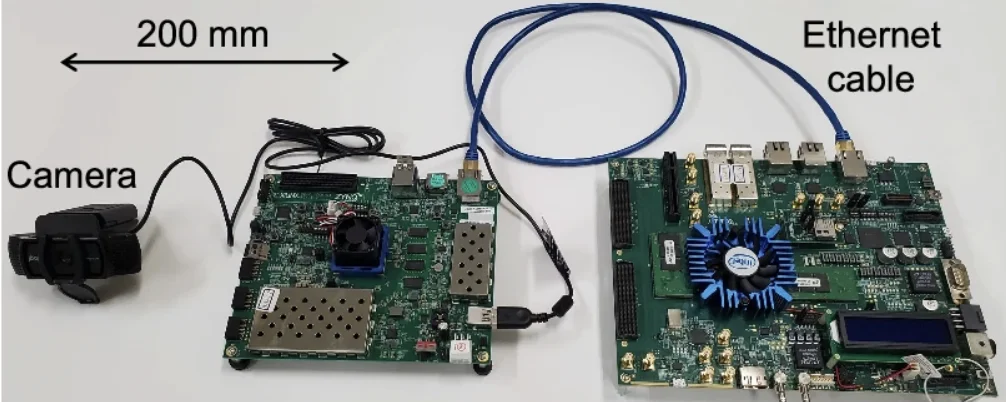
To do so, Toshiba developed a new multi-object tracking algorithm designed to run on the SBM and then implemented it on an embedded FPGA using proprietary circuit design techniques. An FPGA is a reconfigurable semiconductor chip that can be programmed to perform specialized tasks efficiently.
The multi-object tracking problem is central to autonomous navigation. A robot must identify each person, vehicle or object in its field of view and follow their movements over time. When objects overlap or temporarily disappear behind others, conventional systems can lose track of them or mistakenly swap identities.
According to the companies, their new algorithm approaches the association between detected objects and tracked objects as a matching problem, a type of combinatorial optimization challenge. In addition to standard one-to-one matching, the approach uses the SBM’s search capabilities to consider one-to-many possibilities, improving the system’s ability to re-identify objects after they have been obscured.
In tests, researchers report the system showed measurable gains. Using a standard benchmark known as Higher Order Tracking Accuracy, or HOTA, the researchers reported a 4% improvement over established multi-object tracking benchmarks. On newly constructed benchmarks designed to emphasize object obscuration, the improvement rose to 23%.
The companies said those gains translate into more reliable tracking and better motion prediction, which in turn can contribute to safer and smoother operation in crowded environments.
From Server Rooms to Robots
According to the teams, one central technical challenge was fitting the optimization engine into hardware small and efficient enough for mobile use.
The SBM is designed with high parallelism, meaning it can perform many calculations simultaneously. Toshiba said it leveraged that architecture along with custom circuit design to achieve high-speed performance even under the power and performance constraints of embedded FPGAs.
In laboratory tests, the embedded system processed repeated detection and tracking cycles at 23 frames per second. For comparison, automated driving systems typically require around 10 frames per second to operate effectively, according to the companies. That margin suggests the system could handle real-time demands without relying on remote servers or high-power computing units.
By moving advanced optimization processing from centralized machines to compact, onboard hardware, the approach could reduce latency — the delay between sensing and action — and limit dependence on network connections.
Real-World Robot Trials
To test the system outside the lab, MIRISE mounted the FPGA running the SBM-based algorithm onto an autonomous mobile robot of its own design. In real-world experiments, the robot navigated while avoiding multiple moving objects.
MIRISE said it enhanced path planning by incorporating the tracking information generated by the SBM. The system analyzes the confidence of object positions and their direction of movement to predict future locations. It dynamically adjusts the space around each object that the robot treats as occupied, reducing unnecessary detours while maintaining safe distances.
Using cameras and other sensors alongside the tracking technology, the robot selected efficient routes in real time in environments that included both static obstacles and moving people or vehicles.
Demand for autonomous systems has been rising in logistics, manufacturing and mobility, driven in part by labor shortages and the push for automation. Warehouse transport robots, agricultural machines and urban delivery vehicles all face similar challenges: operating safely in dynamic settings while keeping hardware compact and affordable.
Toshiba and MIRISE said they plan to expand the use of embedded quantum-inspired optimization to other forms of autonomous control. Potential applications include coordinating multiple robots, optimizing routes in more complex spaces and allocating tasks in real time among fleets of machines.
The companies also said they aim to extend the technology to other embedded systems, including factory and warehouse robots, construction and agricultural machinery, infrastructure monitoring and energy management systems.
As for the work’s impact on the quantum technology field, while it does not involve a true quantum computer, the research reflects a broader trend of adapting concepts from quantum research to classical hardware. By embedding such algorithms directly into mobile machines, the companies are betting that quantum-inspired computing can help bridge the gap between increasingly sophisticated decision-making demands and the physical limits of onboard electronics.


