Insider Brief
- Cornell University researchers have developed a robotic collective that behaves more like a flowing material than a traditional machine, allowing groups of simple robots to self-organize and adapt without centralized control.
- The study, published in Science Robotics, explores “mechanical intelligence,” where coordinated behavior emerges from the robots’ physical interactions and structure rather than complex software or communication systems.
- The system, called the Cross-Link Collective, uses small robotic modules that temporarily attach and detach with Velcro-like connections, enabling the group to reorganize, recover from failures and move collectively through challenging environments.
Cornell University researchers have developed a collective robotic system that behaves more like a flowing material than a traditional machine, demonstrating how groups of simple robots can self-organize and adapt to changing environments without centralized control.
According to Cornell, the research, conducted by engineers at Cornell and collaborators at the Georgia Institute of Technology and published in Science Robotics, explores a concept known as “mechanical intelligence,” where coordinated behavior emerges from the physical interactions between robots rather than from complex software, wireless communication or centralized computation.
“Instead of relying on explicit computation and communication, the system shifts the intelligence into the shape of the robots and their physical interactions,” noted Kirstin Petersen, associate professor of electrical and computer engineering and the Aref and Manon Lahham Faculty Fellow in the Cornell Duffield College of Engineering and the study’s corresponding author. “We’re leveraging the contact dynamics to let useful behaviors emerge, so the system naturally settles into configurations that reduce internal stresses and improve motion.”
How Do They Work?
The system is called the Cross-Link Collective and it consists of dozens of small robotic modules that individually have limited mobility but collectively form flexible chains capable of coordinated movement. The researchers suggest that embedding intelligence into a robot’s physical structure and interactions could offer a new path toward resilient robotic systems designed for unpredictable real-world environments.
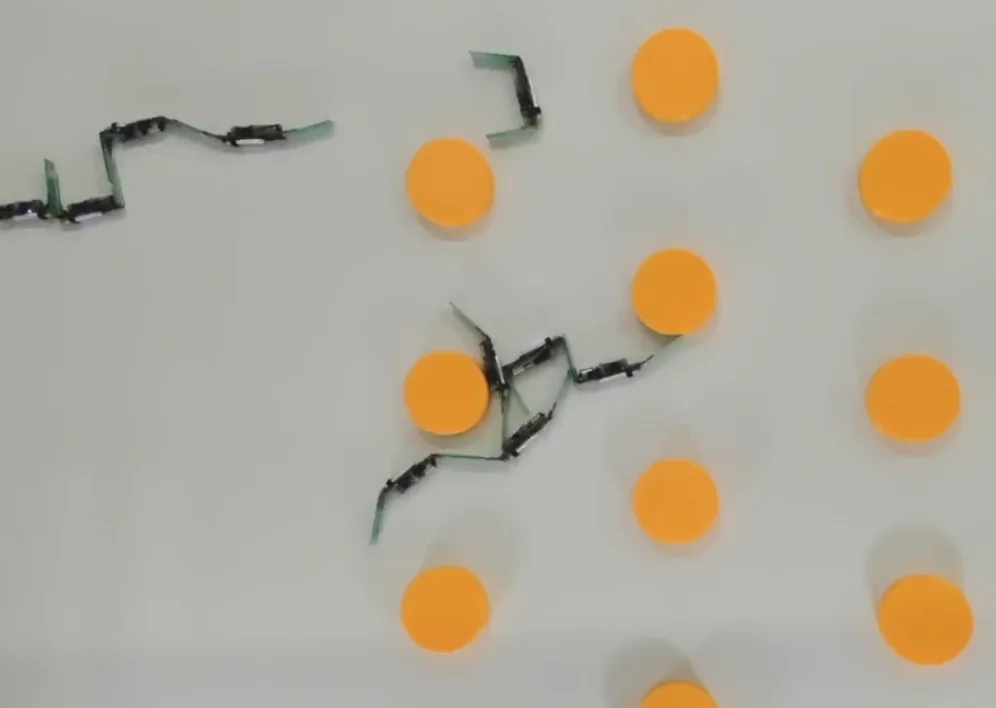
According to the researchers, each module is roughly 200 millimeters long and contains a small motor that repeatedly shifts the robot between two physical shapes, a ‘U’ and a “I”. Those motions generate small forces that allow the modules to move and collide with one another. Weak Velcro connections on either end enable the robots to temporarily attach and detach, forming dynamic chains that continuously reorganize as they move.
Individually, the robots move inefficiently and often struggle with obstacles or inclines. But when linked together, the collective behaves differently. On sloped surfaces, groups of robots moved more reliably than single units, which frequently stalled depending on their orientation. In cluttered environments, the robotic chains behaved similarly to flowing materials, maintaining cohesion while breaking apart when necessary to avoid becoming stuck.
The researchers said the collective’s resilience stems from redundancy and decentralized behavior. The system continues functioning even if individual modules fail or lose power because no single robot controls the group.
The study also demonstrated that small additions of sensing and communication could improve performance, according to the researchers. When isolated from the collective, individual robots emit an audible signal that prompts nearby units to slow down, giving the disconnected module time to reconnect. The robots determine whether they remain connected based on how much physical jostling they experience from neighboring modules rather than through direct communication or centralized tracking.
Origins of the Study and What it Means
The project builds on earlier work from researchers at the Georgia Institute of Technology, who originally designed the robotic modules. Cornell researchers refined the system through extensive experimentation and statistical analysis, studying how factors such as module size and shape influence collective movement and entanglement.
The researchers drew inspiration from active gels, a class of materials in which molecular connections continuously form and dissolve while preserving overall structure. Rather than focusing solely on practical deployment, the researchers said the system serves as a platform for studying how physical interactions alone can produce adaptive and robust collective behaviors.
“It doesn’t matter if one module has a compromised battery or fails for other reasons,” added lead author Danna Ma, M.Eng. ’17, Ph.D. ’25, visiting lecturer in electrical and computer engineering. “The system stays functional because it can adapt. It is redundant and doesn’t depend on any single module.”
Image credit: Cornell University